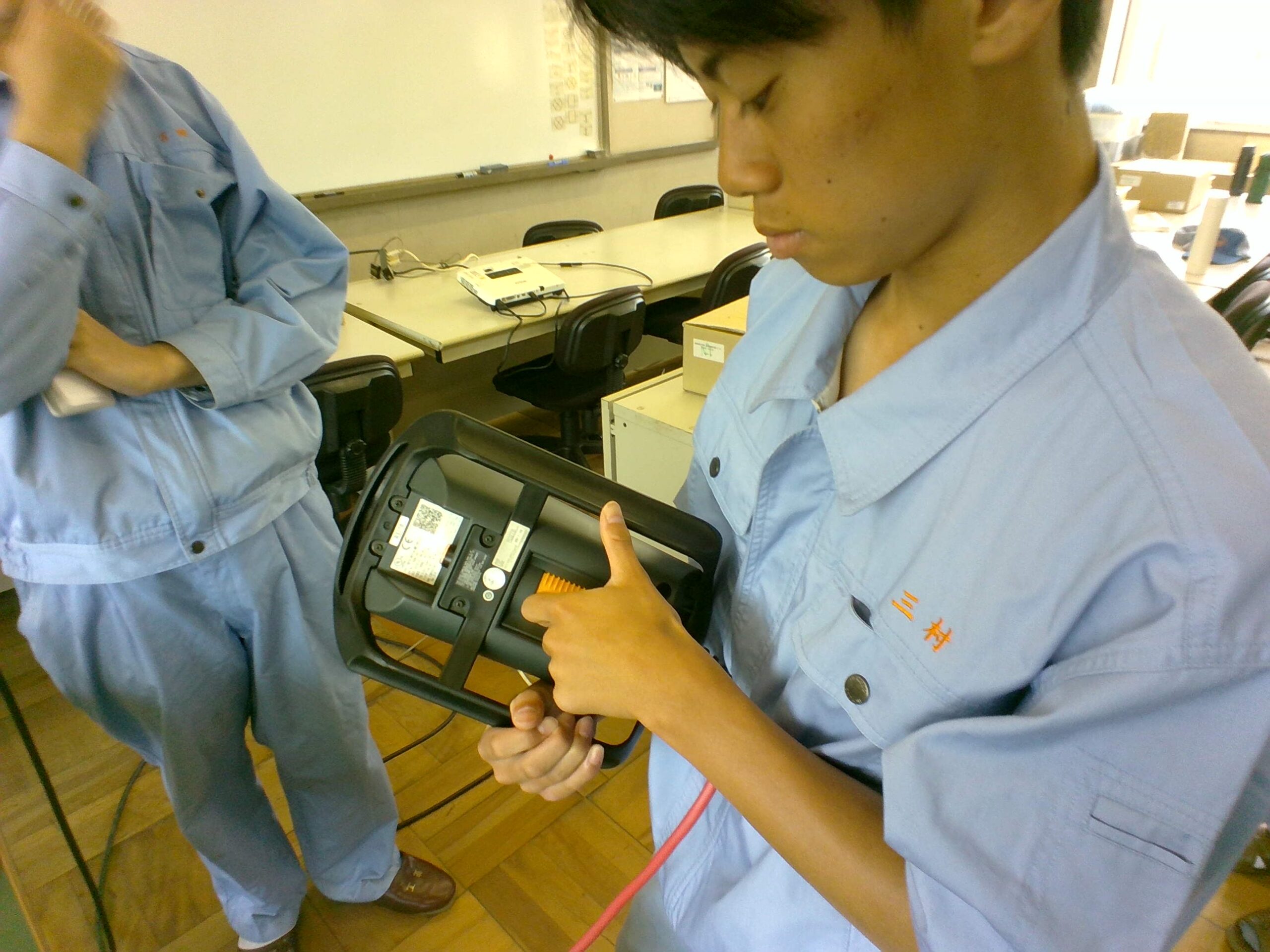
3年生がロボットアームを制御しています。このペンダントと呼ばれるコントローラの裏にレバーがあって、このレバーを半分握らないと、アームが動きません。操作中に握りすぎたり、離れてしまったりと操作に苦労していました。
この投稿は 2023年6月27日 火曜日 11:28 AM に 電子機械科 カテゴリーに公開されました。 この投稿へのコメントは RSS 2.0 フィードで購読することができます。 現在コメント、トラックバックともに受け付けておりません。
コメントは受け付けていません。